Perspective
MODOOL – Trainingsgerät für Chirurgen | Designsprint 21
Chirurg/Innen müssen viel trainieren, bis sie lebende Patienten behandeln können. Simulatoren für Laparoskopie oder andere minimalinvasive Verfahren sind teuer. Vor allem der hohe Preis und eine eingeschränkte Vielfalt der darstellbaren Verfahren vieler Systeme ist bei der Marktrecherche aufgefallen. Dadurch wird Übungszeit für selbstständiges Lernen der Verfahren in einer risikoarmen Umgebung stark eingeschränkt. Ein günstigeres und vielseitigeres System würde Ärztinnen und Ärzten ermöglichen, sich auf interaktive Weise mit wichtigen Grundlagen oder unbekannten Prozeduren vertrauter zu werden.
MODOOL – Trainingsgerät für Chirurgen
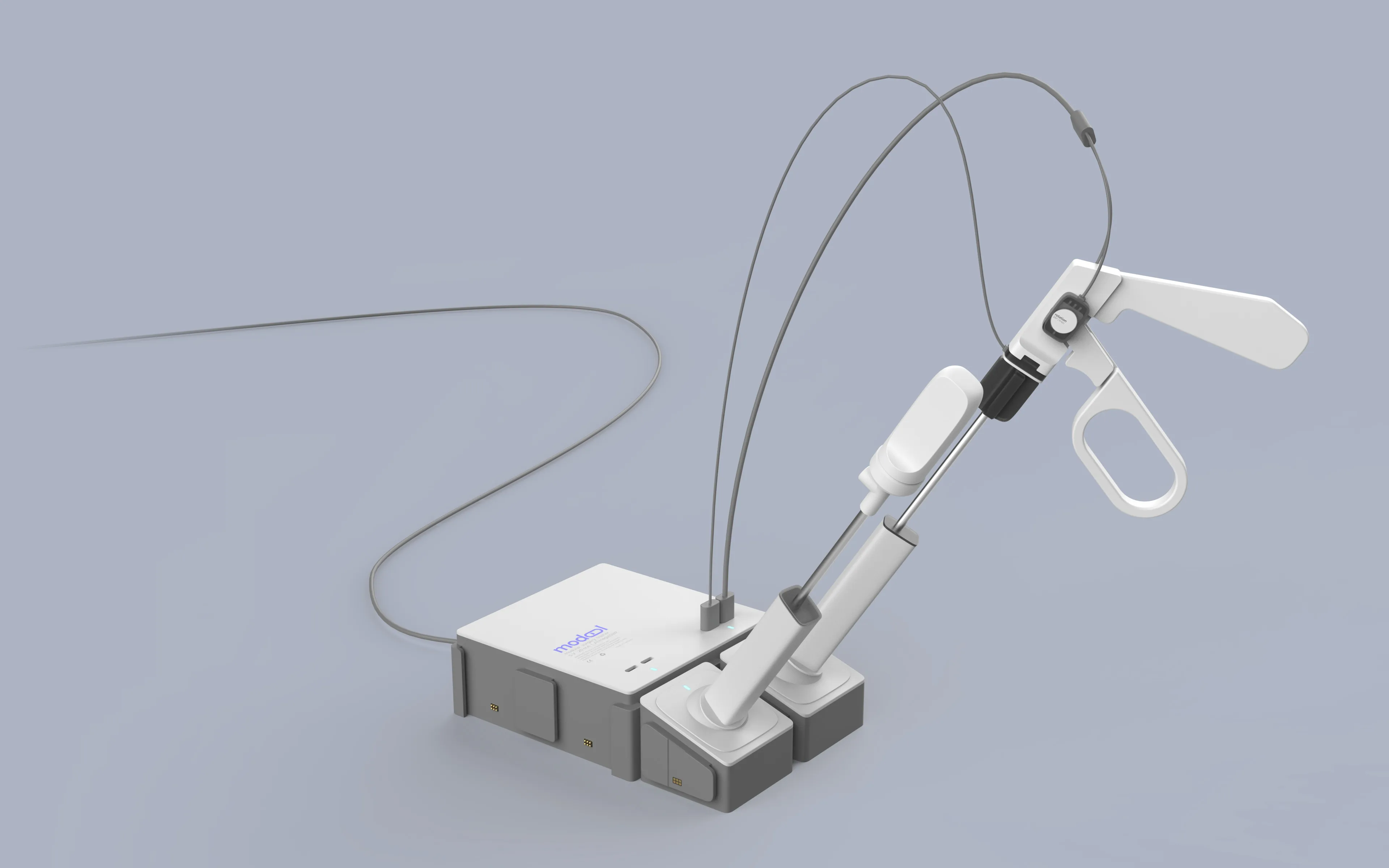
Bei MODOOL handelt es sich um ein Trainingsgerät für angehende und erfahrende Chirurginnen und Chirurgen. In einem Medical Design Sprintprojekt im Jahr 2023 hat Designstudent Marius Kühn das Konzept für MODOOL entworfen. Abgebildet werden damit vor allem minimalinvasive Verfahren wie Laparoskopien oder Gelenkspiegelungen. Durch den modularen Aufbau soll sich eine hohe Vielfalt an Szenarien mit möglichst einfachen und günstigen Mitteln darstellen lassen.
Persönliches Ziel für den Entwurf war die Konzeption eines möglichst realistischen und universal einsetzbaren Produkts. Um die technische Umsetzung möglichst genau zu untersuchen, wurde ein Funktionsprototyp entwickelt, der alle wesentlichen Funktionen zur Bedienung eines solchen Simulators widerspiegeln sollte. Neben wichtigen Erkenntnissen über den Einsatz der gewählten Sensoren dient der Prototyp auch als Beweis, dass eine unkomplizierte, kostengünstige Umsetzung des technischen Packages durchaus realistisch ist. Mithilfe eines Arduino Mikrocontrollers und einer Handvoll einfacher Sensoren lässt sich so ein recht genaues, digitales Abbild des Werkzeugs in der 3D Engine erzeugen.
Auf Basis des Prototypen wurde schließlich das Konzept verfeinert und ein Entwurf als Vision für ein marktreifes Produkt ausgearbeitet.
Das Herzstück des Simulators bildet das Hauptmodul, wie der Arduino beim Prototypen werden hier die Signale der Sensoren als digitale Werte ausgelesen und über eine USB-Verbindung an den Computer weitergegeben.
Aus den benötigten Sensoren wurden zwei Arten von Modulen abgeleitet: Das grundlegendende Positionsmodul erfasst die Position des gesamten Werkzeugs relativ zum virtuellen Patienten. Erfasst werden sowohl der Winkel des Werkzeugs als auch die Eindringtiefe. Diese Module können direkt oder über verschiedene Verbindungsstücke in verschiedenen Positionen und Ausrichtungen an der Haupteinheit verankert werden. Die Signale werden über Kontakte ohne zusätzliche Kabel oder Stecker weitergeleitet.
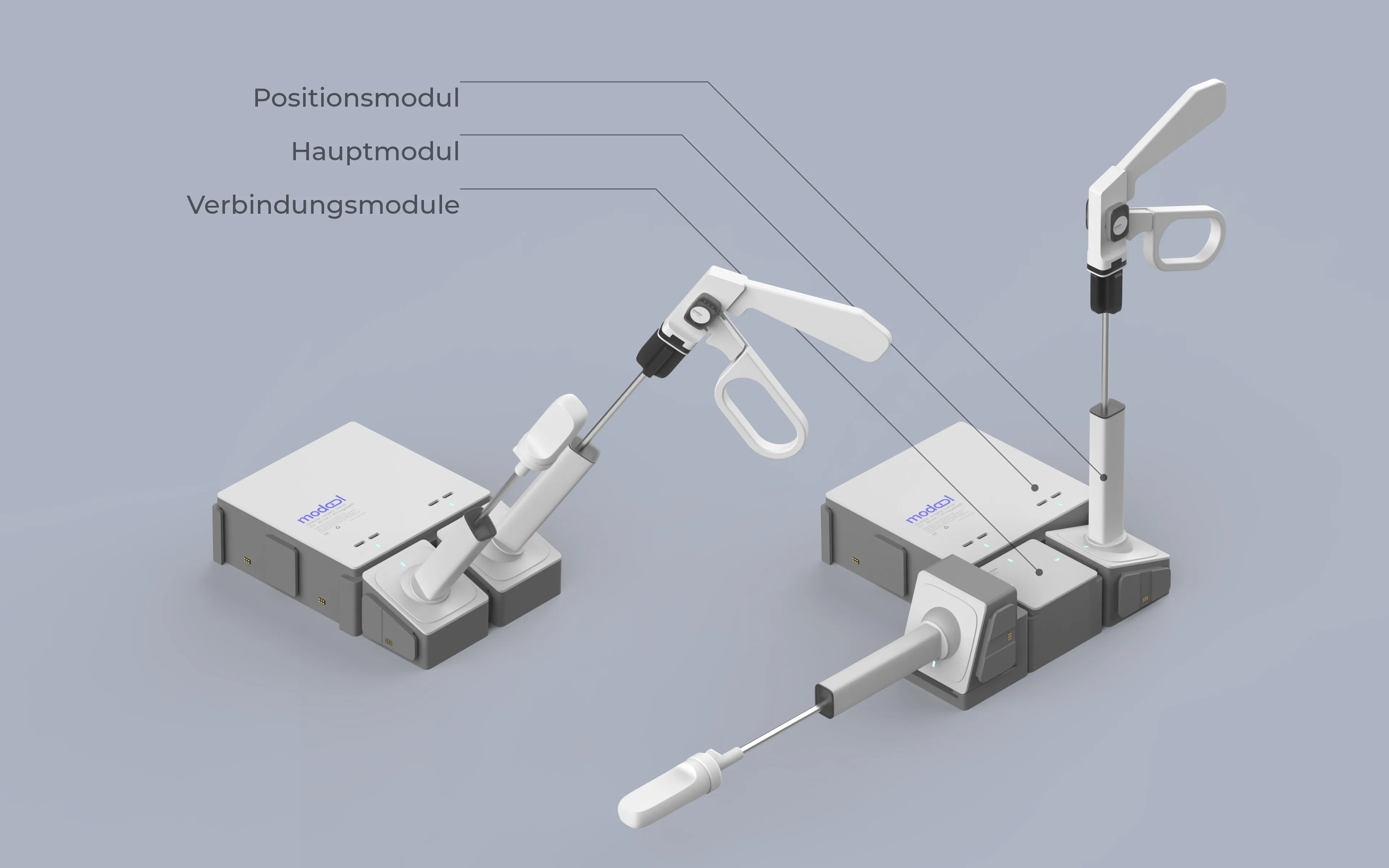
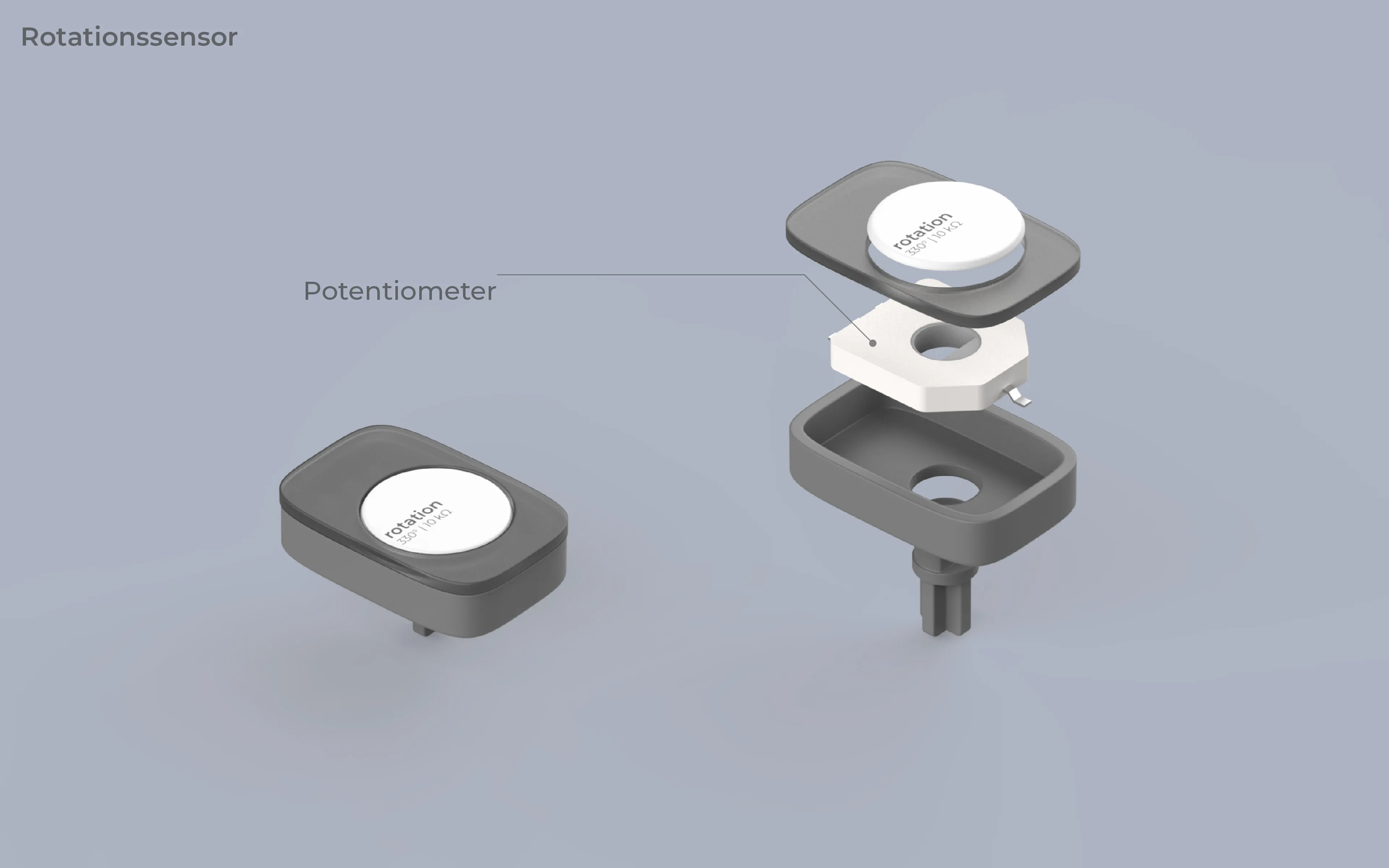
Die zweite, kleinere Art der Module sind einfache Rotationssensoren, die direkt an den Werkzeuggriffen angebracht werden. Sie können verwendet werden, um Bewegungen wie das Öffnen und Schließen von Scheren und Zangen zu erfassen.
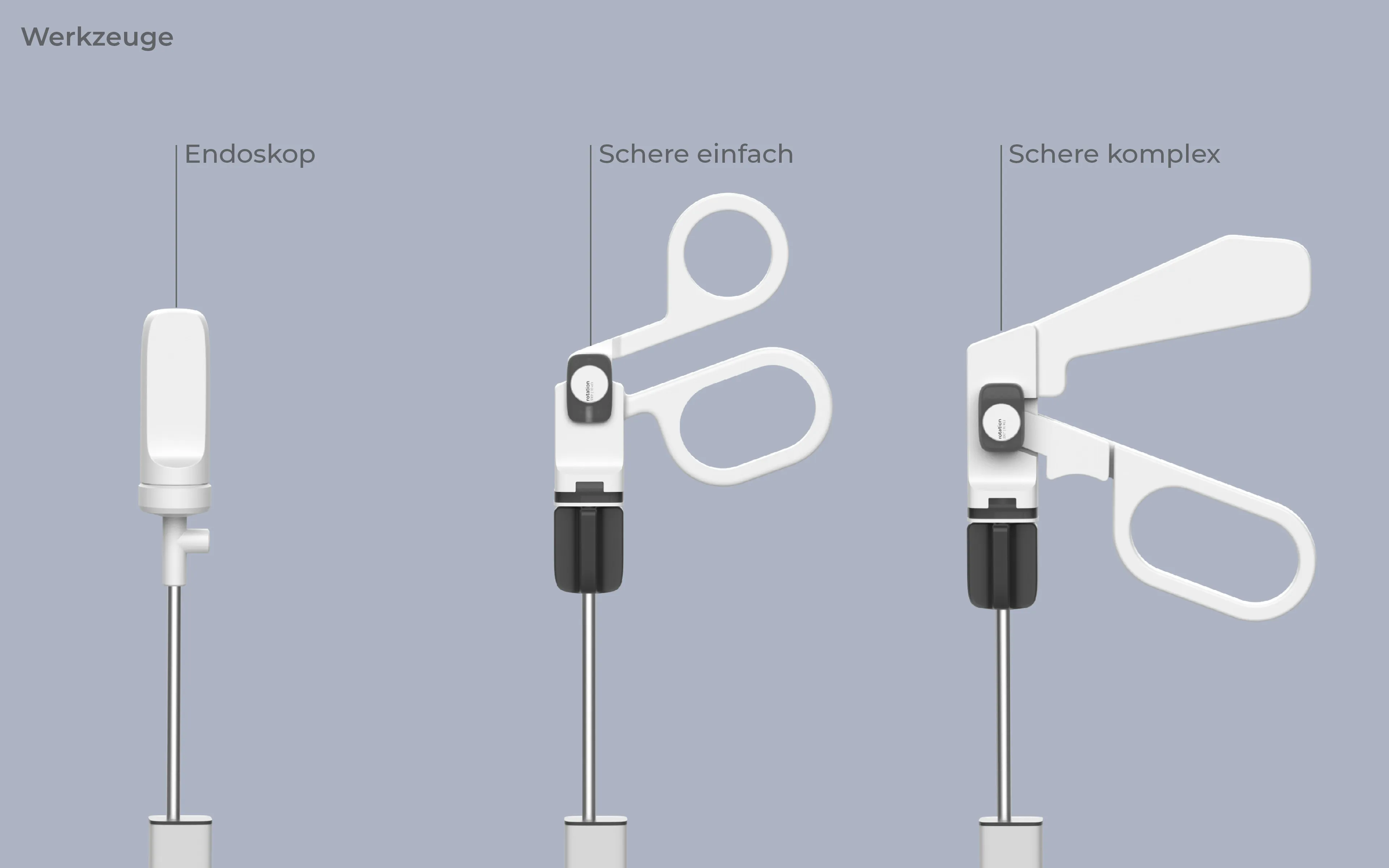
Auf Basis dieser Module wurden schließlich beispielhaft die Griffe von drei Instrumenten umgesetzt: ein Endoskop, eine einfache chirurgische Schere oder Zange und eine komplexere Zange mit einem zusätzlichem Artikulationsgrad.
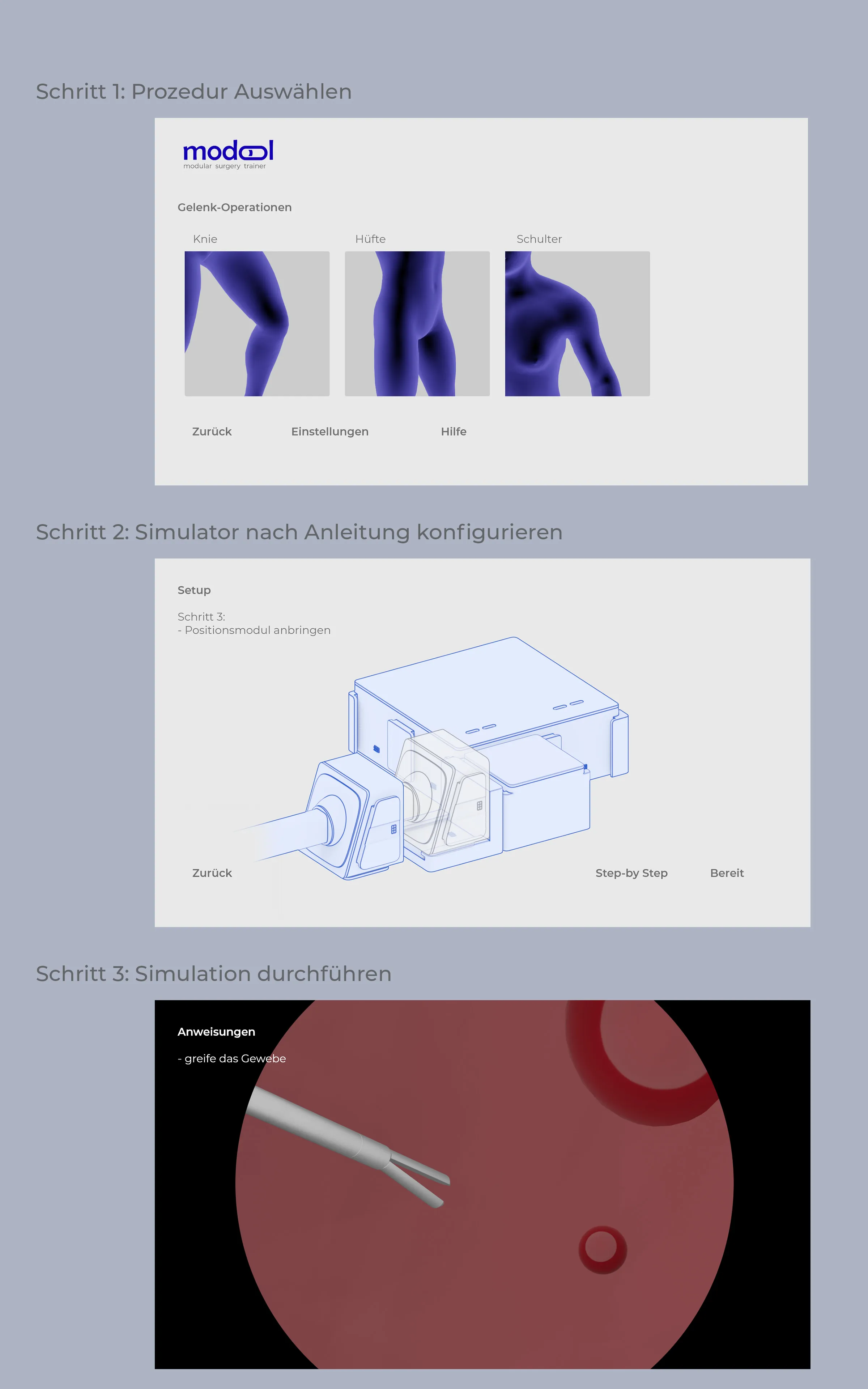
Als letzter Schritt wurde noch mithilfe von einem groben Entwurf des Interfaces der genaue Ablauf der Konfiguration der Module veranschaulicht: Zunächst muss das zu simulierende Verfahren aus dem Menü gewählt werden. Anschließend erhalten Nutzer eine schnelle, veranschaulichte Schritt-für-Schritt-Anleitung, wie die Module konfiguriert werden sollen, um das Szenario möglichst realistisch abzubilden. Ist das geschehen, kann die Simulation gestartet und das Verfahren virtuell geübt werden.
Danke für deinen Medical Design Sprint, Marius.
Häufig gestellte Fragen